The SPD Control System
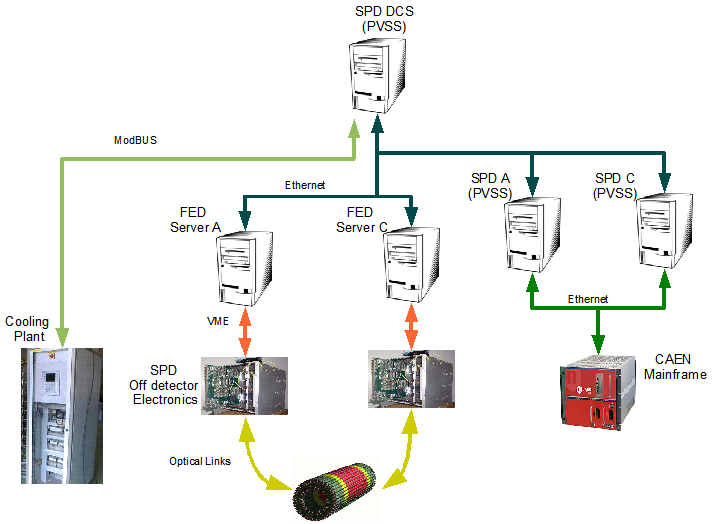
The SPD DCS (Detector Control System) is a distributed control software composed by 5 computers:
- 2 FED (Front End Device) Servers:
One for side A and the other for side C. They physically control the SPD off-detector electronics through a VME BUS and can receive commands from other computers over the network through a DIM interface.
- 3 WinCC Control Nodes:
WinCC is a SCADA (Supervisory Control and Data Acquisition) language which enables the development of distributed and redundant control systems. The SPD supervision/WinCC layer controls the overall status of the detector taking appropriate corrective actions to maintain the system stability and ensure the data quality. The SPD supervision layer is composed by 3 machines/projects:
spd_a and spd_c :
Each one controlling the CAEN power supplies and FSM (Finite State Machine) for the half-staves of side A and side C of the detector.
spd_dcs:
Top level WinCC project taking care of the top level FSM and controlling the cooling plant, the VME crates, the CAEN mainframe and the comunication with the FED servers.
SPD DCS Devices Diagram
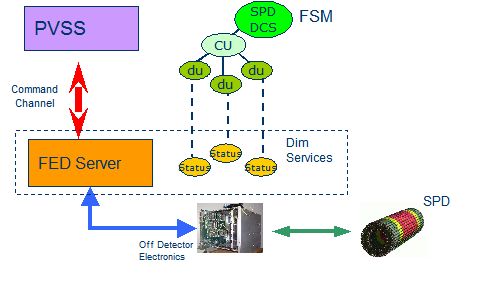
The SPD FED Server
The SPD FED (Front End Device) Server is a stand-alone application designed to be the driver layer of the system. It interfaces with the SPD electronics and its capable of receiving commands and of publishing status information to several computers over the network
It was developed in C++ to provide an interface to all hardware features and to be the first layer of control of the system. Its main purpose is to configure the detector, provide hardware debugging tools, perform calibration procedures and to publish status information on the system ensuring the data quality. There are two instances of the SPD FED servers used in the SPD DCS, one for side A and one for side C, each one of them being able to freely access the 32 bit VME address space in the Hardware using a JTAG player embedded in the Router to configure the detector.
Fed Server Preliminary User Manual (PDF)
Spd Configuration DataBase Schema (PDF)
For Development details please look at the doxygen documentation